
PSoC4の開発環境「ModusToolBox」で、タッチセンサとシリアル通信をするメモです。使用するPSoCは「CY8C4025AXI-S412」で、タッチセンサのオンオフ情報を、シリアル送信するサンプルです。
何も考えずにタッチセンサとシリアル通信を一緒に使うと、信号が文字化けしてしまいました。理由は、シリアル送信の実行の直後に、タッチセンサの再スキャンをしているためでした。シリアル信号が送信完了するまで時間がかかるのに、それを待たずにタッチセンサ処理が始まり、シリアル信号のタイミングがズレていくんだと思われます。解決するにはシリアル送信のプログラムを書く場所がポイントでした。
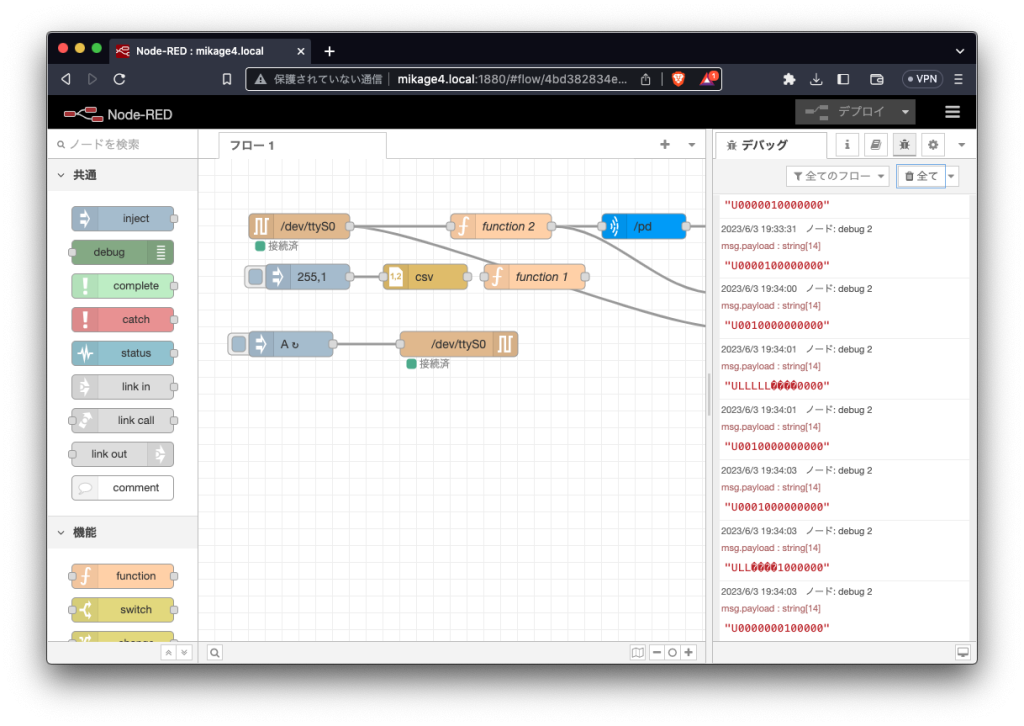
シリアル送信の文字化け
「U」を先頭に13コのタッチ情報を「0」「1」で、シリアル送信したのですが、うまくいくときもあれば、文字化けしてしまうときもありました。
タッチセンサのプログラムの基本
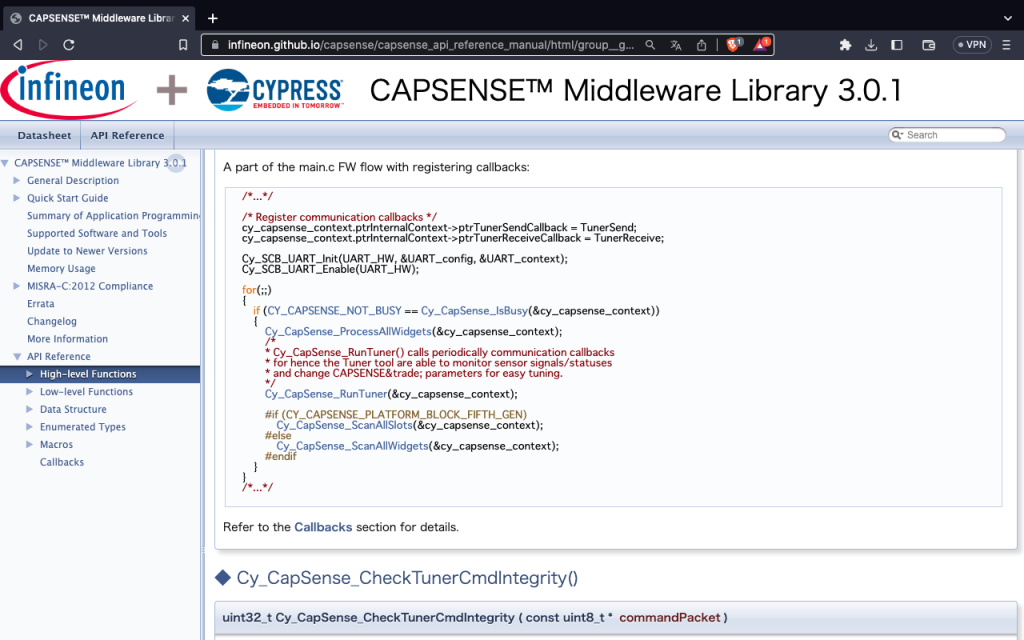
Infenionのサイトにある、CapsenseTunerのUARTサンプルコードでは、以下のような流れで書くようになっています。
// CAPSENSE First SCAN
Cy_CapSense_ScanAllWidgets(&cy_capsense_context);
// Loop
for (;;) {
//
if (CY_CAPSENSE_NOT_BUSY == Cy_CapSense_IsBusy(&cy_capsense_context)) {
// CAPSENSE Process all widgets
Cy_CapSense_ProcessAllWidgets(&cy_capsense_context);
// ...ボタンやスライダの状態を調べたりする
// ...
// ...
// CAPSENSE Tuner
Cy_CapSense_RunTuner(&cy_capsense_context);
// CAPSENSE Start the next scan
Cy_CapSense_ScanAllWidgets(&cy_capsense_context);
}
}
最初にタッチセンサをスキャンします。スキャンが完了したら、ボタンやスライダーの処理をして、その情報をUARTで送信し、新しいセンサのスキャンを開始する、というループになっています。
新しいセンサをスキャンする前に、UART部分を書くと思っていたのですが、これだと文字化けが怒ってしまいました。新しいスキャンを実行した後にUART部分を書くと解決しました。
以下main.cのプログラムです。
#include "cy_pdl.h"
#include "cybsp.h"
#include "cycfg.h"
#include "cycfg_capsense.h"
#include "cy_gpio.h"
#define CAPSENSE_INTR_PRIORITY (3u) // psoc4 priority = 0~3
#define CY_ASSERT_FAILED (0u)
static void handle_error(void);
static void initialize_capsense(void);
static void capsense_isr(void);
#define MAX_S 13
uint8_t led = 0;
uint8_t touch_status[MAX_S] = { 0 };
uint8_t touch[MAX_S] = { 0 };
uint8_t send_data[MAX_S + 1] = { 0 };
int main(void) {
cy_rslt_t result;
cy_en_scb_uart_status_t initstatus;
cy_stc_scb_uart_context_t CYBSP_UART_context;
// Initialize Device and Peripherals
result = cybsp_init();
if (result != CY_RSLT_SUCCESS) {
CY_ASSERT(0);
}
// Enable Global Interrupts
__enable_irq();
// StartUp LED
for (int i = 0; i < 10; i++) {
Cy_GPIO_Write(P1_2_PORT, P1_2_NUM, 1);
Cy_SysLib_Delay(25);
Cy_GPIO_Write(P1_2_PORT, P1_2_NUM, 0);
Cy_SysLib_Delay(50);
}
// Initialize UART
initstatus = Cy_SCB_UART_Init(CYBSP_UART_HW, &CYBSP_UART_config, &CYBSP_UART_context);
if (initstatus != CY_SCB_UART_SUCCESS) {
handle_error();
}
// UART
Cy_SCB_UART_Enable(CYBSP_UART_HW);
// CAPSENSE
initialize_capsense();
// COMMAND HEADER
send_data[0] = 'U';
// CAPSENSE First SCAN
Cy_CapSense_ScanAllWidgets(&cy_capsense_context);
// Loop
for (;;) {
//
if (CY_CAPSENSE_NOT_BUSY == Cy_CapSense_IsBusy(&cy_capsense_context)) {
// CAPSENSE Process all widgets
Cy_CapSense_ProcessAllWidgets(&cy_capsense_context);
led = 0;
for (int i = 0; i < MAX_S; i++) {
if (0 != Cy_CapSense_IsWidgetActive(i, &cy_capsense_context)) {
if (touch_status[i] == 0) {
touch_status[i] = 1;
touch[i] = 1;
} else {
touch[i] = 0;
}
} else {
touch[i] = 0;
touch_status[i] = 0;
}
if (touch[i] == 1) {
led = 1;
}
send_data[i + 1] = touch[i] + '0';
}
if (led == 1) {
Cy_GPIO_Write(P1_2_PORT, P1_2_NUM, 1);
} else {
Cy_GPIO_Write(P1_2_PORT, P1_2_NUM, 0);
}
// CAPSENSE Start the next scan
Cy_CapSense_ScanAllWidgets(&cy_capsense_context);
// UART Send
Cy_SCB_UART_PutArrayBlocking(CYBSP_UART_HW, &(send_data[0]), sizeof(send_data));
}
}
}
// SYSTEM
static void handle_error(void) {
__disable_irq();
while (1) {
}
}
// CAPSENSE
static void initialize_capsense(void) {
cy_capsense_status_t status = CY_CAPSENSE_STATUS_SUCCESS;
const cy_stc_sysint_t capsense_interrupt_config = {
.intrSrc = CYBSP_CSD_IRQ, .intrPriority = CAPSENSE_INTR_PRIORITY, };
status = Cy_CapSense_Init(&cy_capsense_context);
if (CY_CAPSENSE_STATUS_SUCCESS == status) {
Cy_SysInt_Init(&capsense_interrupt_config, capsense_isr);
NVIC_ClearPendingIRQ(capsense_interrupt_config.intrSrc);
NVIC_EnableIRQ(capsense_interrupt_config.intrSrc);
status = Cy_CapSense_Enable(&cy_capsense_context);
}
}
static void capsense_isr(void) {
Cy_CapSense_InterruptHandler(CYBSP_CSD_HW, &cy_capsense_context);
}